Matlab Robotics Toolbox–创建一个机器人 下面创建一个两个连杆的机械臂,它具有下面标准的D-H参数 Link aia_iai αi\alpha_iαi did_idi θi\theta_iθi 1 1 0 0 θ1\theta_1θ1 2 1 0 0 θ2\...
”matlab robot“ 的搜索结果
该资源用于机械臂的运动学、动力学求解, 注意:含有robot.m 和drivebot.m函数

this cod for balancing robot for dspic micro controller.
比较实用的串联机器人工作空间、运动轨迹matlab仿真程序,可以作为机器人科研人员学习使用。
摘要:要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。matlab中robotics toolbox的函数解说1. PUMA560的...
最近在学INTRODUCTION TO ROBOTICS MECHANICS AND CONTROL也就是国内的机器人导论第三章的MATLAB实验要用到LINK ROBOT FKINE三个函数网上查了半天总是有问题 LINK我只用到了最简单的这个参数L =LINK([alpha A theta ...
matlab roobotic toolbox机器人工具箱 强大的处理能力,10.3版本。
软件:matlab2014a工具箱:Matlab Robotic Toolbox v9.8这里感谢枫箫提供的机器人工具箱:http://blog.sina.com.cn/u/2707887295本次...安装好MatlabRobotic Toolboxv9.8后,打开MATLAB,查看附带的例子输入rtbde...
机器视觉仿真工具包下载 machine vision tools 3.3 适用于rvb第一版
Robot toolbox- rtbdemo 1. 依据D-H参数建立机器人模型 2. 代码解释 单个Link的解释 建立机器人整体的解释 运动学正解 绘图 运动学逆解 微分运动学(求雅克比矩阵) 0. 前言 在初学机器人学的时候
MATLAB中机器人工具箱,robot-9.10zip中解压出来的需要安装在MATLAB文件夹下的内容,官网下载限速,现和大家分享,全网最低积分,绝对好用
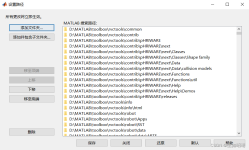
3、打开MATLAB,在File菜单下选择Set Path,打开如下对话框 4、单击“Add With SubFolder”,选择上面的工具箱 5、点击“Save”,然后点击“Close”。这样就把工具箱的路径添加到MATLAB的路径中了,也就是工具箱...
Matlab Robotics Toolbox是一个用于机器人建模和控制的Matlab工具箱。它提供了一系列函数和工具,用于创建、模拟和控制各种类型的机器人系统。 使用Matlab Robotics Toolbox,您可以进行以下操作: 1. 机器人建模:...
根提供的引文内容,使用matlab2019版本进行可视化模型时,可能会出现错误。在figure图框之前或teach()函数之前,应该添加view(3)来以三维方式显示图像。以下是代码示例: ```matlab % theta d a alpha offset L1 = ...
在MATLAB中,Robotics Toolbox的plot函数用于显示机器人运动的动画。该函数会自动添加运动轨迹,并以不同颜色区别显示机器人的各个关节。在坐标命名方面,MATLAB Robotics Toolbox通常使用以下命名约定: - 第一个...
matlab开发-robotArm
标签: 未分类
matlab开发-robotArm。模拟和动画一个三连杆机械臂举起一个玻璃到桌子高度。
MATLAB Robot toolkit使用说明中文版 最近在用MATLAB的robot toolkit,踩了一些坑,总结一下还是没有理解基础概念或者对toolkit不熟悉。下决心翻译一下toolkit的说明文档,本着开源共享的思想没有放在积分下载区,...
1. PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。其中link函数的调用格式:L = LINK(...
Set Python Version pyversion 2.7 要设置版本,请键入: pyversion executable 其中executable是Python可执行文件的完整路径 参考文献https://www.cnpython.com/qa/465240
%机器人构建clc; clear;L1=link([pi/2 150 0 0]);L2=link([0 570 0 0]);L3=link([pi/2 130 0 0]);L4=link([-pi/2 0 0 640]);L5=link([pi/2 0 0 0]);...r=robot({L1 L2 L3 L4 L5 L6});r.name='MOTOMAN-UP...
matlab开发-robotarm。该项目描述了Simmechanics与虚拟现实之间的链接,以模拟机器人手臂。
matlab roobotic toolbox机器人工具箱 强大的处理能力,10.3版本。 相关下载链接://download.csdn.net/download/zhifeia/11149450?utm_source=bbsseo
1、下载该工具箱 2、将压缩包解压到一个文件夹下面 3、打开...这样就把工具箱的路径添加到MATLAB的路径中了,也就是工具箱安装了。 相关下载链接://download.csdn.net/download/zdm0100/8498317?utm_source=bbsseo
```matlab %% 机器人运动学正解 clc; clear; L = [0 0 0 0.290 0 0.302]; % 机械臂长度 robot = SerialLink([0 L(1) L(2) 0 0 0; 0 0 L(3) L(4) 0 L(6); 0 0 0 L(5) 0 0], 'name', 'ABB 120-3/0.6'); % 机器人模型 q...
第三章的MATLAB实验要用到LINK ROBOT FKINE三个函数 网上查了半天总是有问题 LINK我只用到了最简单的这个参数 L =LINK([alpha A theta D sigma]) 直接把相应的DH表的数据填入就会
%机器人构建 clc; clear; L1=link([pi/2 150 0 0]); L2=link([0 570 0 0]); L3=link([pi/2 130 0 0]); L4=link([-pi/2 0 0 640]); L5=link([pi/2 0 0 0]); ...r=robot({L1 L2 L3 L4 L5 L6});
Robot Raconteur 是一个强大的通信框架或机器人和自动化。 该工具箱包含 Matlab 版本的 Robot Raconteur 核心库。 有关更多信息,请参阅http://robotraconteur.com
推荐文章
- Java---简单易懂的KNN算法_jf.knn-%; 9 &-程序员宅基地
- 最新版ffmpeg 提取视频关键帧_从视频中获取flag-程序员宅基地
- 【ARM Cache 系列文章 11 -- ARM Cache 直接映射 详细介绍】
- Objective-C学习计划
- 【数据结构】最小生成树(Prim算法、Kruskal算法)解析+完整代码
- python访问组策略_python 模块 wmi 远程连接 windows 获取配置信息-程序员宅基地
- html把div做成透明背景,DIV半透明层 CSS来实现网页背景半透明-程序员宅基地
- 关机恶搞小程序
- mnist手写数字分类的python实现_TensorFlow的MNIST手写数字分类问题 基础篇-程序员宅基地
- wxpython窗口跳转_WxPython-用按钮打开一个新窗口-程序员宅基地